Research

Cranial Cruciate Ligament Injury
Cranial cruciate ligament (CrCL) deficiency affects the canine stifle (knee) and is one of the most common orthopedic problems in dogs, having an economic impact of more than $1 billion in the US. In one study, 31,698 of 1,243,681 dogs were diagnosed with CrCL deficiency; a prevalence of 2.55% across all breeds. CrCL deficiency is common in some breeds while unlikely in others; Newfoundlands (8.9%), Rottweilers (8.3%), and Labrador Retrievers (5.8%) have the greatest prevalence. Despite such high prevalence, CrCL deficiency is still poorly understood and is thought to be due to degradation and not the sole result of trauma. Several corrective surgical procedures have been developed to return the dog to pre-injury function following CrCL rupture, but no one technique has proven to be fully superior or fully accepted by orthopedic surgeons.
Development of a canine stifle computer model to investigate cranial cruciate ligament deficiency

A complete understanding of the biomechanics of the canine stifle prior to and following CrCL rupture is needed to gain an improved understanding of stifle biomechanics and the factors that predispose dogs to CrCL rupture. A three dimensional solid body computer model of the canine hind limb was developed to simulate both a CrCL-intact stifle and a CrCL-deficient stifle. Furthermore, key biomechanical parameters thought to be associated with CrCL deficiency likelihood (such as ligament stiffness and tibial plateau angle) were investigated by conducting a parametric sensitivity analysis. This computer model is also being used to implement and simulate corrective surgical procedures to gain an understanding of the altered stifle joint biomechanics following surgical intervention. This analysis will seek to provide biomechanical evidence in support of or against current CrCL surgical repair techniques.
 |
Funded by the American Kennel Club Canine Health Foundation |
|---|
Evaluation of Canine Stifle Cranial Cruciate Ligament Deficiency Surgical Stabilization Procedures Using a Computer Model
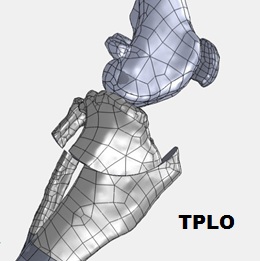
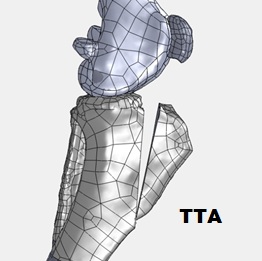 Surgical intervention is often employed to stabilize the CrCL-deficient stifle, but no single surgical procedure is supported conclusively by data to suggest long-term success, osteoarthritis prevention or superiority. We propose to investigate commonly employed surgical procedures (tibial plateau leveling osteotomy (TPLO), tibial tuberosity advancement (TTA) and extra-capsular stabilization) using our previously developed canine pelvic limb 3D computer model to gain an improved understanding of stifle biomechanics following CrCL-deficient stifle stabilization. We will investigate parameters specific to each surgical procedure using our computer model to further our understanding of their influence on stifle stabilization. Furthermore, we will investigate anatomical characteristics (e.g. tibial plateau angle) to gain an improved understanding of their role in surgical intervention efficacy. Our computer model will be used to compare ligament and stifle structure stresses in the intact stifle vs. surgically stabilized stifles to provide a biomechanical, evidence-based assessment of currently used stifle stabilization surgical procedures.
Surgical intervention is often employed to stabilize the CrCL-deficient stifle, but no single surgical procedure is supported conclusively by data to suggest long-term success, osteoarthritis prevention or superiority. We propose to investigate commonly employed surgical procedures (tibial plateau leveling osteotomy (TPLO), tibial tuberosity advancement (TTA) and extra-capsular stabilization) using our previously developed canine pelvic limb 3D computer model to gain an improved understanding of stifle biomechanics following CrCL-deficient stifle stabilization. We will investigate parameters specific to each surgical procedure using our computer model to further our understanding of their influence on stifle stabilization. Furthermore, we will investigate anatomical characteristics (e.g. tibial plateau angle) to gain an improved understanding of their role in surgical intervention efficacy. Our computer model will be used to compare ligament and stifle structure stresses in the intact stifle vs. surgically stabilized stifles to provide a biomechanical, evidence-based assessment of currently used stifle stabilization surgical procedures.
|
Funded by the American Kennel Club Canine Health Foundation |
|---|
Biomechanical Evaluation of a Canine Stifle-Stabilizing Orthosis for Cranial Cruciate Ligament Deficiency Using Computer Model Simulated Gait


Stifle orthoses (braces) offer an alternative to surgical intervention, especially in patients that are poor anesthesia candidates, suffer significant co-morbidities, and are of advanced age or whose owners lack the financial means for more costly surgery. However, orthoses can also provide stifle stability in combination with surgery pre- and post-operatively. We propose to describe canine stifle orthoses user characteristics through development of an orthoses patient database, and to investigate stifle biomechanics complimented with a customized stifle orthosis using a previously developed canine pelvic limb 3D computer simulation model of gait. Our analysis will compare stifle biomechanics with and without an orthosis in a CrCL-deficient stifle to an intact stifle during gait. We will investigate stifle orthosis design and fit parameters (e.g. hinge type, strap tension), along with patient-specific parameters, using our computer model of simulated gait to understand their role in orthosis effectiveness. Our goal is to biomechanically assess a customized orthosis in stabilizing the CrCL-deficient stifle. This study is being conducted through collaboration with a leading veterinary orthoses developer and manufacturer, OrthoPets. For more information about OrthoPets please visit their website at www.orthopets.com.
|
Funded by the American Kennel Club Canine Health Foundation |
|---|
Joint Kinematics During Aquatic and Land Treadmill Activity in Dogs with Surgically Repaired Cranial Cruciate Ligament Injury
 Much attention has been given to surgical technique for the repair of CrCL rupture and the role it plays in recovery, with relatively little attention to postoperative therapy. In humans, numerous studies have shown significant improvements in return to function following orthopedic surgery. Rehabilitation is now standard for humans following major orthopedic surgery. Recent studies in dogs have also shown that rehabilitation can significantly improve function following surgery. Although rehabilitation is not standard care in dogs at this point, it has become increasingly more popular in recent years. Rehabilitation facilities for dogs often use an aquatic treadmill to allow exercise with partial weight bearing on the affected joint. However, little is known regarding the biomechanics associated with dogs walking on an aquatic treadmill. Objective documentation of biomechanical measures during aquatic treadmill therapy is needed and may aid in quantifying its benefits.
Much attention has been given to surgical technique for the repair of CrCL rupture and the role it plays in recovery, with relatively little attention to postoperative therapy. In humans, numerous studies have shown significant improvements in return to function following orthopedic surgery. Rehabilitation is now standard for humans following major orthopedic surgery. Recent studies in dogs have also shown that rehabilitation can significantly improve function following surgery. Although rehabilitation is not standard care in dogs at this point, it has become increasingly more popular in recent years. Rehabilitation facilities for dogs often use an aquatic treadmill to allow exercise with partial weight bearing on the affected joint. However, little is known regarding the biomechanics associated with dogs walking on an aquatic treadmill. Objective documentation of biomechanical measures during aquatic treadmill therapy is needed and may aid in quantifying its benefits.
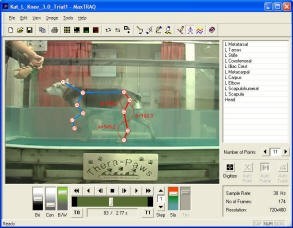 The purpose of this study is to characterize and compare the joint kinematics in dogs that have undergone CrCL surgery while walking on a land treadmill and an aquatic treadmill at three different water levels. Joint range of motion and angular velocity will be calculated. Additionally, passive range of motion measurements of injured dogs will be assessed and compared to the measured active range of motion.
The purpose of this study is to characterize and compare the joint kinematics in dogs that have undergone CrCL surgery while walking on a land treadmill and an aquatic treadmill at three different water levels. Joint range of motion and angular velocity will be calculated. Additionally, passive range of motion measurements of injured dogs will be assessed and compared to the measured active range of motion.
We hypothesize that dogs that have undergone surgical treatment of a ruptured CrCL will have greater hip, stifle, and tarsus joint range of motion and angular velocity while walking on the aquatic treadmill than walking on the land treadmill. We also hypothesize that the highest water level (water level with greater trochanter) will produce the greatest range of motion and angular velocity. This study may be beneficial in providing information that can be used to better understand and optimize rehabilitation prescriptions. To see a video of a dog walking on the aquatic treadmill, click the link: Water Treadmill Video.
The study is in collaboration with the Rehabilitation & Conditioning Services department in the Central Texas Veterinary Specialty Hospital (CTVSH) in Austin, Texas. CTVSH provides referral service in Surgery, Internal Medicine, Dermatology, Emergency & Critical Care, and Rehabilitation & Conditioning Services for companion animals. For more information about CTVSH please visit their website at http://ctvsh.com.
Canine Wheelchair Project
 Neurological deficits, injury, and disease can lead to hind limb paresis or paraplegia in dogs. Dogs with these conditions, as well as those recovering from hind limb surgeries, may benefit from wheelchair usage. Studies have shown that canine wheelchair usage can improve overall health and quality of life of dogs, as well as assist guardians with care giving. Currently most wheelchairs are customized to an individual dog, leading to high costs with inability for the wheelchairs to adapt to a growing dog or to be reused by another dog. Unfortunately for some guardians, the cost of a wheelchair is prohibitive, and may influence euthanasia decisions. Hence, the goal of this study was to design and develop a low-cost, highly adjustable canine wheelchair prototype that is suitable for a medium-sized dog. A video of the prototype canine wheelchair in use can be viewed at the link: Canine Wheelchair Video.
Neurological deficits, injury, and disease can lead to hind limb paresis or paraplegia in dogs. Dogs with these conditions, as well as those recovering from hind limb surgeries, may benefit from wheelchair usage. Studies have shown that canine wheelchair usage can improve overall health and quality of life of dogs, as well as assist guardians with care giving. Currently most wheelchairs are customized to an individual dog, leading to high costs with inability for the wheelchairs to adapt to a growing dog or to be reused by another dog. Unfortunately for some guardians, the cost of a wheelchair is prohibitive, and may influence euthanasia decisions. Hence, the goal of this study was to design and develop a low-cost, highly adjustable canine wheelchair prototype that is suitable for a medium-sized dog. A video of the prototype canine wheelchair in use can be viewed at the link: Canine Wheelchair Video.
To find out more and to download wheelchair building instructions, please contact Gina Bertocci at g.bertocci@louisville.edu
Intervertebral Disk Herniation and Spinal Cord Injury
Intervertebral disk herniation (IVDH) leads to spinal cord injury (SCI) in dogs. The most commonly affected breed is the Dachshund, of which 19% develop IVDH. IVDH compresses the spinal cord and can lead to paralysis, incontinence, reduced quality of life, permanent neurological deficits and secondary conditions. Dogs that receive decompressive surgery (standard of care) and rehabilitation immediately following IVDH may regain the ability to walk, but certain aspects of recovery, such as muscle activation patterns, are not clearly understood.
Development of a neuromusculoskeletal computer simulation gait model to characterize functional recovery in dogs with intervertebral disk herniation

An improved understanding of muscle activation during walking following IVDH-associated SCI is needed. However, muscle activation patterns are difficult to directly measure, and isolation of individual muscle activation is not feasible. Therefore, our goal is to characterize individual muscle activation patterns during walking using novel computer simulation techniques in: 1) a healthy Dachshund, 2) a Dachshund with moderate IVDH-associated SCI following surgical decompression at multiple time points during recovery. Subject-specific computer models will be developed based on medical imaging, and hind-limb motion, ground reaction forces, and body weight support provided during walking. We will characterize differences in hind-limb motion and muscle activation patterns during walking between the healthy dog and dog with SCI, as well as differences in the dog with SCI throughout recovery. Our outcomes will enhance understanding of functional recovery following surgical treatment of IVDH, which will provide a foundation for improved clinical decision making regarding treatment options and investigating future therapeutic interventions. The healthy dog simulation model was published in Frontiers in Bioengineering and Biotechnology.
|
Funded by the American Kennel Club Canine Health Foundation |
|---|
Describing the Kinetic and Kinematic Recovery of Dachshunds with Spinal Cord Injury
 Traditionally, qualitative scoring systems have been used to determine injury severity, recovery, and identify if therapies are effective. More recently, computerized gait assessment (kinematics) has been applied to dogs with IVDH. These studies have examined dogs at single time points and suggest that kinematics is more sensitive than traditional scoring in detecting changes in gait. Our goal is to characterize gait recovery in Dachshunds with IVDH using kinematics. We will utilize dogs with moderate and severe injury to capture the spectrum of dysfunction and recovery that occurs following injury. All dogs will receive spinal decompression surgery (standard) and be assessed at 5 time points: pre-surgery and 7, 14, 30 and 90 days post-surgery. Information will be compared to the gait of healthy Dachshunds. This work is novel based on the quantitative, kinematic and longitudinal characterizations of locomotion in healthy and spinal cord injured Dachshunds. The major outcomes will be: 1) an enhanced understanding of natural recovery post-IVDH; 2) improved clinical decision making with respect to treatment options; 3) identification of effective assessment parameters; and 4) creation of a baseline for future clinical trials assessing therapies.
Traditionally, qualitative scoring systems have been used to determine injury severity, recovery, and identify if therapies are effective. More recently, computerized gait assessment (kinematics) has been applied to dogs with IVDH. These studies have examined dogs at single time points and suggest that kinematics is more sensitive than traditional scoring in detecting changes in gait. Our goal is to characterize gait recovery in Dachshunds with IVDH using kinematics. We will utilize dogs with moderate and severe injury to capture the spectrum of dysfunction and recovery that occurs following injury. All dogs will receive spinal decompression surgery (standard) and be assessed at 5 time points: pre-surgery and 7, 14, 30 and 90 days post-surgery. Information will be compared to the gait of healthy Dachshunds. This work is novel based on the quantitative, kinematic and longitudinal characterizations of locomotion in healthy and spinal cord injured Dachshunds. The major outcomes will be: 1) an enhanced understanding of natural recovery post-IVDH; 2) improved clinical decision making with respect to treatment options; 3) identification of effective assessment parameters; and 4) creation of a baseline for future clinical trials assessing therapies.
|
Funded by the American Kennel Club Canine Health Foundation |
|---|